
Fundamentals of Features and Corners
Features: What are they?
Series: Fundamentals of Features and Corners:
Several computer vision tasks require finding matching points across several frames or views. With that info, you could really do a lot of stuff. An example. When doing stereo imaging, you want to know a few corresponding points between the two views. Once you do, you can triangulate almost all points on the image (just like the brain does!). We can accomplish this with something called features.
The first approach: Patches
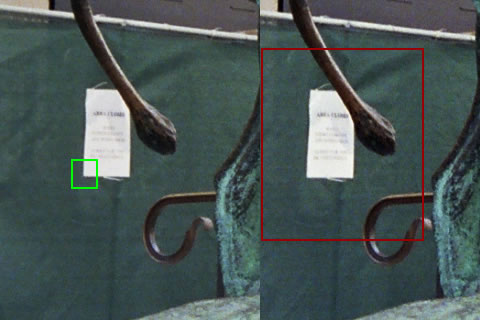
Intuitively, you'd be tempted to match small "patches" between the two images. Something like this:
Matching patches between images
You want to find the left image's green path in the right. And you can do that quite easily. The white thingy makes the patch quite unique. Even something as trivial as template matching would be able to find it.
But, not all patches are so uniquely recognizable. Check the patches below:
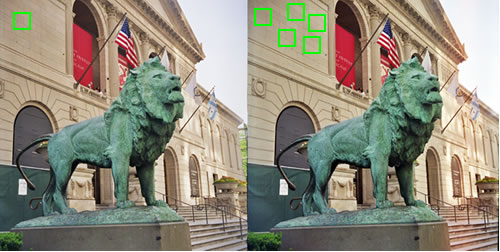
Bad patches between a pair of images
There are no unique "features" to identify on the wall. So you'll have problem finding corresponding points. So the patches approach isn't that great.
Corners
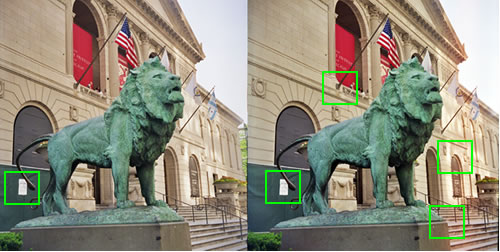
Corners in an image seem to be perfect for such tracking tasks. Here's an example image:
Good patches between two images that are visually unique
These corners are perfect! Why?
Uniquely identifiable
These points are uniquely identifiable. What do I mean by that? Here's what. Lets say you're trying to find the green corner in the right image (in the image below). You know that it'll be somewhere around the same location. So you can narrow down the "search region". And within this search region, there would be only one point that resembles the corner.
Of course, the assumption here is that there isn't a massive difference between the two images. And this is usually a reasonable assumption.
Identifiable within a region
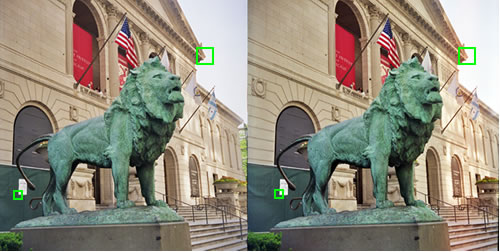
Stable
These points usually don't keep moving around in the image. This helps tracking. And any motion of this point, even a little one, produces a large variation. You can clearly see the point moving around.
A bad feature
I'll try to make the idea of a "corner" more concrete. We'll use some math to do this. How do you identify a bad feature? Something that doesn't have a lot of variation... like the example of the wall above.
There are no edges or corners in the feature. So, the first derivative is flat, in both directions, x and y. Or, the first derivative is flat in all directions (all directions are a certain combination of the x and y component).
So, the second derivative also does not change in any direction.
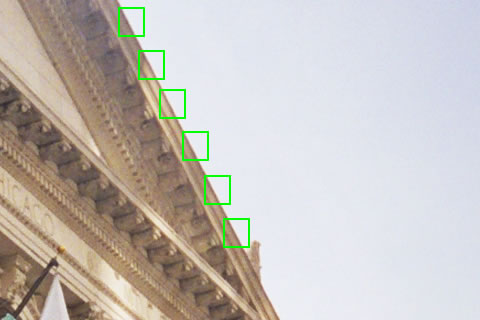
An edge
An edge is a bad feature as well. If you move in the direction of the edge, you won't even know you're moving. For example, if you move along the edge at the top of the building and the sky, you won't even realize it.
Motion along an edge
But if you move from the building to the sky (perpendicular to the edge) you'll "see" motion. This is the only direction where you can accurately tell how fast the object is moving.
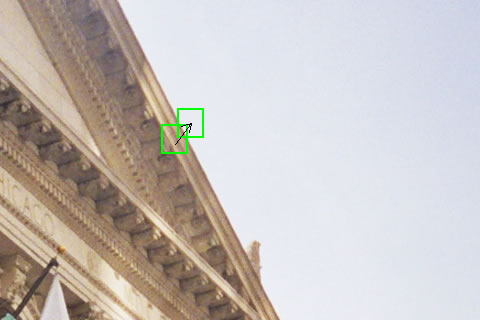
Motion perpendicular to an edge
So edges aren't that useful as features.
The first derivative changes in only the one direction (perpendicular to the edge). Some progress, but not that good. So, the second derivative also changes in only one direction.
A corner
A corner is an awesome feature! There's variation all around a corner. So, the derivative changes in all directions. So the second derivative also changes in all directions! Great! And you can write pretty efficient programs to calculate that at all points.
So there you have it! Identifying good features: If the first derivative keeps changing around a point, you know you have a corner. And you also know you have a good feature to track!
So what exactly is a feature?
Until now, we've talked about patches of images that are uniquely identifiable. But, exactly how do you identify them? One way is to directly use the pixel RGB values - and this is exactly what happens when using template matching. You represent the patch as a sequence of numbers and compute the squared difference. However, you could get more sophisticated and use some other numbers to represent the patches (the three dominant colors, metadata like the GPS coordinates, etc).
In computer vision, this is termed as a feature descriptor and there exist several techniques to describe an image patch using a sequence of numbers.
More in the series
This tutorial is part of a series called Fundamentals of Features and Corners:
- Features: What are they?
- Harris Corner Detector
- Interesting windows in the Harris Corner Detector
- The Shi-Tomasi Corner Detector
- Subpixel Corners: Increasing accuracy
Related posts


Additional functions to view what's happening
Here's a simple task - given an image find the dominant colors in the image. I'll walk you through a lesser known technique that does not use kmeans.
Read more

Generating Multivariate Gaussian Random Numbers
Given a covariance matrix and a mean vector, how do we generate random vectors from the corresponding Gaussian model?
Read more